weblog:
A website that displays in chronological order the postings by one or more individuals and usually has links to comments on postings.
Raytje
De verzamelde werken – Volume II
De gebruikelijke verzameling van belangrijke informatie, wetenswaardigheden, laatste nieuwtjes, eerste geruchten, roddel, achterklap, onzin en klets.
Tricopter continued
De afgelopen dagen heb ik veel geoefend. Het was mooi windstil weer, de gelegenheid om te proberen de tricopter onder controle te krijgen. Ik was er de afgelopen maanden achter gekomen dat de stabiliteit nogal gevoelig is voor trillingen. Is er een propeller/motor comibinatie uit balans, dan reageren de gyro-sensoren meteen op en is het ding eigenlijk niet in bedwang te houden. Ik heb alle propellers gebalanceerd en nu is het ding lekker rustig.
Als dan ook de wind er niet is, kan ik in de tuin uitgebreid oefenen.


Op een LiPo batterij vliegt het ding ongeveer 5 minuten. Met 3 batterijen kan ik een kwartier vliegen. Na een week oefenen kan ik hem dan wel redelijk stabiel in de lucht houden, maar echt vliegen is er nog niet bij. Ik moet de hele tijd achter het ding staan, zodat mijn stuurbewegingen op de zender overeenkomen met de bewegingen van de tricopter. Als ik er voor sta, dan zijn de bewegingen net andersom, en dat is vragen om problemen. Dat is de volgende stap.
Hier nog een filmpje:
/wordpress/wp-content/uploads/2011/10/Tricopter_continued.wmvKoptertje
De laatste weken heb ik aardig wat uren aan mijn tricopter besteed. Eigenlijk een flink stuk opnieuw gebouwd. De vorige versie, bestaande uit 2 CDs met daarop de elektronica heeft een flink aantal crashes niet overleefd. Daarom heb ik een versie uit triplex gebouwd, die hopelijk meer flexibel is.
Vervolgens ook aandacht besteed aan de trillingen in het ding. Door onbalans in de propellers ging het geheel zo trillen dat de gyro’s van slag af raakten. Ze zorgden ervoor dat de tricopter niet stabiel in de lucht te houden was. Door de propellers te balanceren verminderden de trillingen en bleek het ding redelijk stabiel te worden.
De afgelopen twee weken heb ik geprobeerd ook nog met het ding te vliegen. Dat is dan de volgende stap. Hieronder een impressie…
/wordpress/wp-content/uploads/2011/06/Kopter.wmvBij het vliegen tijdens de filmpjes vond ik al dat ie wat lastiger stabiel te houden was. Na afloop bleken verschillende propellerbladen iets verbogen te zijn, waarschijnlijk door een voorgaande klap. Dat zal wel voor onbalans hebben gezorgd met bijbehorende gezwabber tijdens het vliegen.
De eerste (crash)vlucht
Inmiddels is de tripcopter al in de prototype testfase beland. Het geheel is samengebouwd, ik heb LiPo batterijen, een afstandbediening, en dat geheel lijkt nog te werken ook. Nu is het alleen een kwestie van leren vliegen. En dat valt niet mee!
Ik heb geprobeerd om de tripcopter aan een draad op te hangen. en zo de eerste beginselen onder de knie proberen te krijgen. Maar dat is toch ook niet de oplossing, de draad waaraan de tripcopter hangt werkt als een veer en de hele constructie inclusief de tripcopter begint te slingeren:
/wordpress/wp-content/uploads/2010/09/Tricopter-aan-draad.wmv


Zoals je kunt zien is de tricopter in hover-mode prima in staat horizontaal te blijven. Dat werkt in ieder geval goed.
Dan maar naar een groot grasveld en zonder draad proberen:
/wordpress/wp-content/uploads/2010/09/Tricopter-first-crash-flight.wmv
Hier een van de eerste vluchten. Na een paar vluchten rammelde een van de motoren los en moesten we stoppen. Misschien vanavond weer, en hopelijk is de wind dan ook gaan liggen.
Samenbouwen
Het begint ergens op te lijken. Na een paar avondjes zagen, vijlen, boren, tappen en lijmen komt er iets herkenbaars uit. Ik denk wel dat dit het prototype gaat worden. Misschien dat ik later nog een betere, mooiere en vooral lichtere ga bouwen. Tot nu toe heb ik op de weegschaal bijna 200 gram gemeten, en dat is nog zonder batterij en electronica. Ik verwacht dat alles zo tegen de 300 gram gaat worden, terwijl het origineel van William Thielicke 238 weegt. Maar die heeft een carbon frame. Dus daar is nog wat winst te halen.
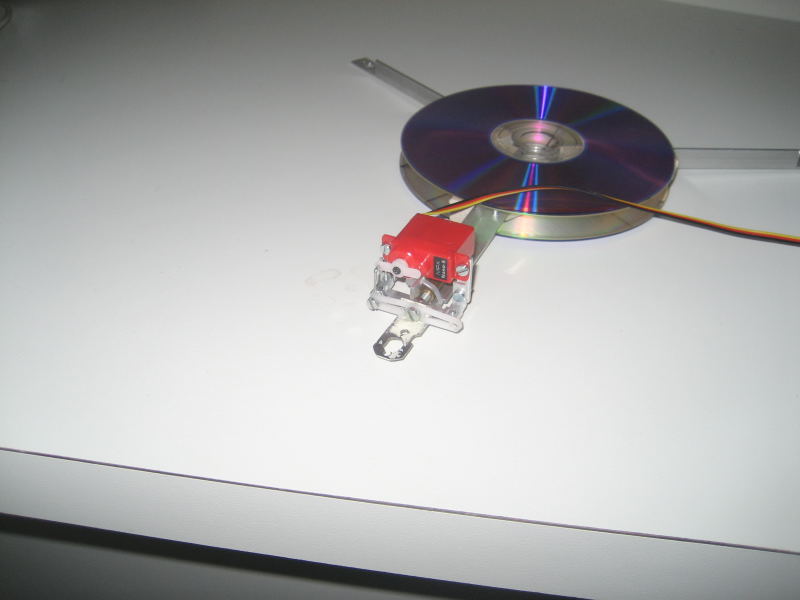
Drie aluminimum hoeklijntjes zijn met balsahout tussen twee CDs gelijmd en geschroefd. Aan de arm met de servo eraan komt de staartrotor.
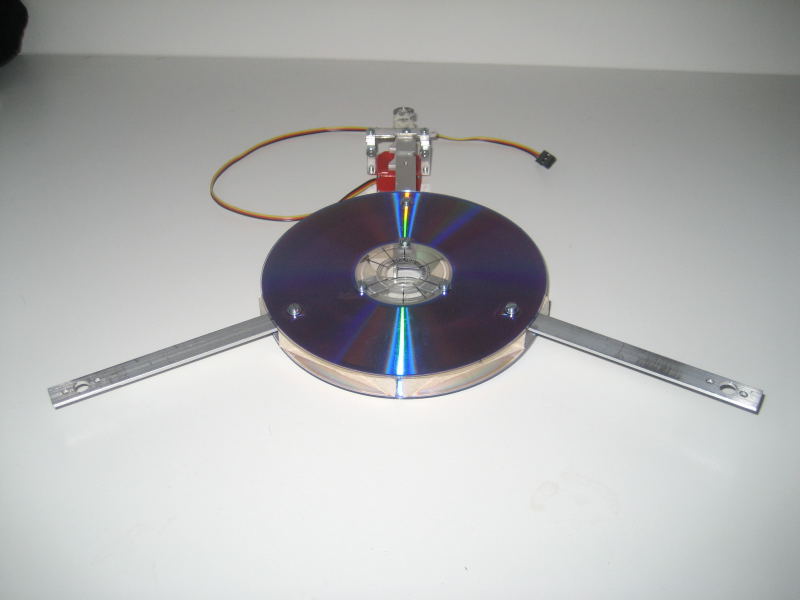
De LiPo batterij komt onder de CDs te hangen. Daarmee komt het zwaartepunt ook meteen laag te hangen.
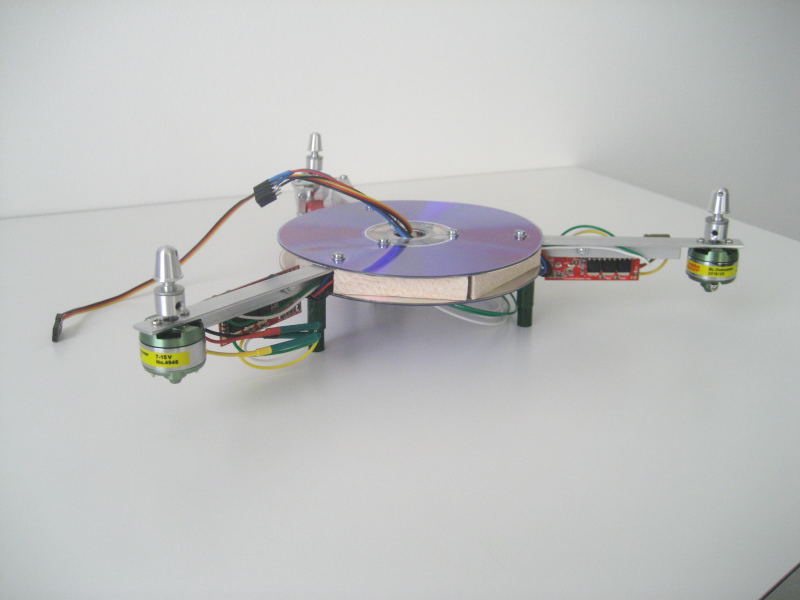


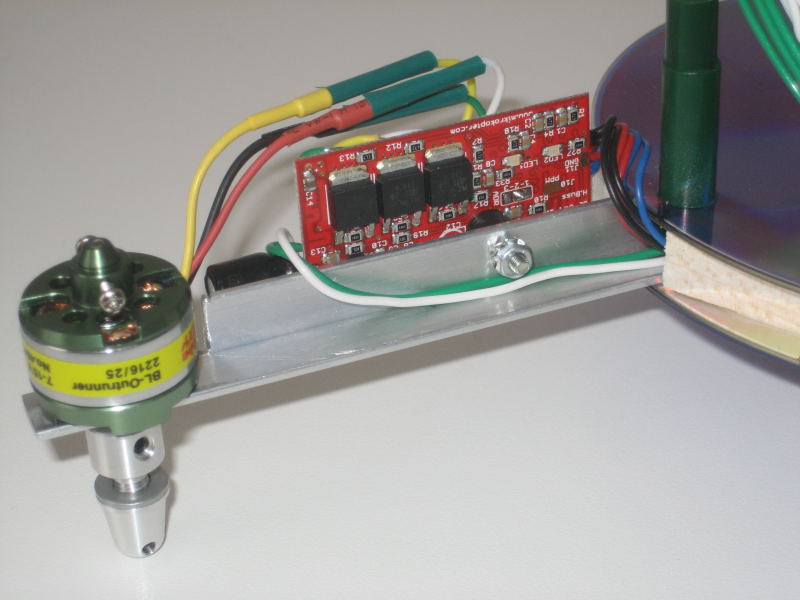
De armen krijgen ook de ESCs eraan. Ze zijn zo bevestigd, dat de luchtstroom de FETs koelt. Ik weet niet of het nodig is, maar het kan nooit kwaad.
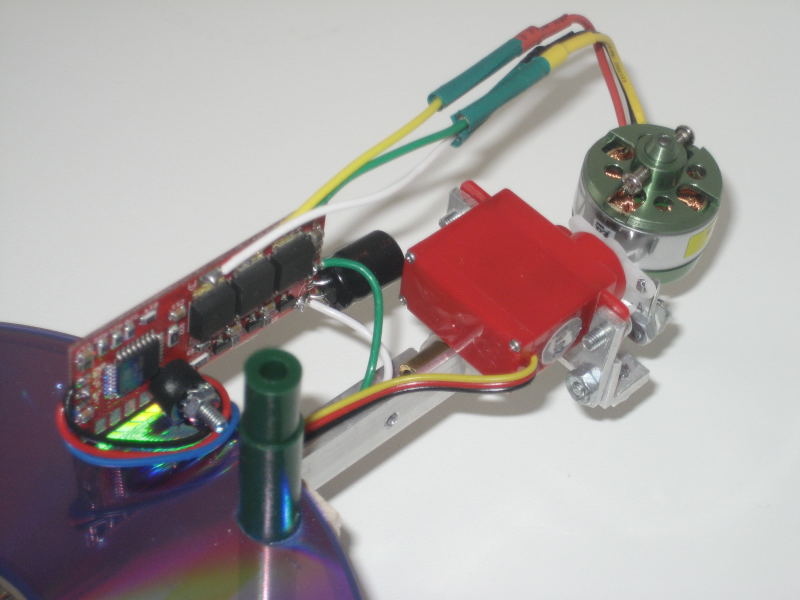


En dan komt er nog wat electronika op: de microcontroller met rand-IO en de versnellingsopnemers met de giro’s
tricopter
Sinds enige tijd ben ik bezig een modelbouw helicopter met 3 rotoren te maken, zeg maar een tricopter. Niet helemaal zelf ontwikkelen, maar naar een voorbeeld: de “shrediquette” (vraag me niet waar die naam vandaan komt….). Een hoop (voor mij) interessante aspecten komen aan de orde: modelbouw, electronica, microcontrollers en software.
In eerste instantie bouw ik het voorbeeld exact na, en ga later misschien zelf wat uitproberen, verbeteren of toevoegen. Eerst maar eens het ding aan het vliegen krijgen…
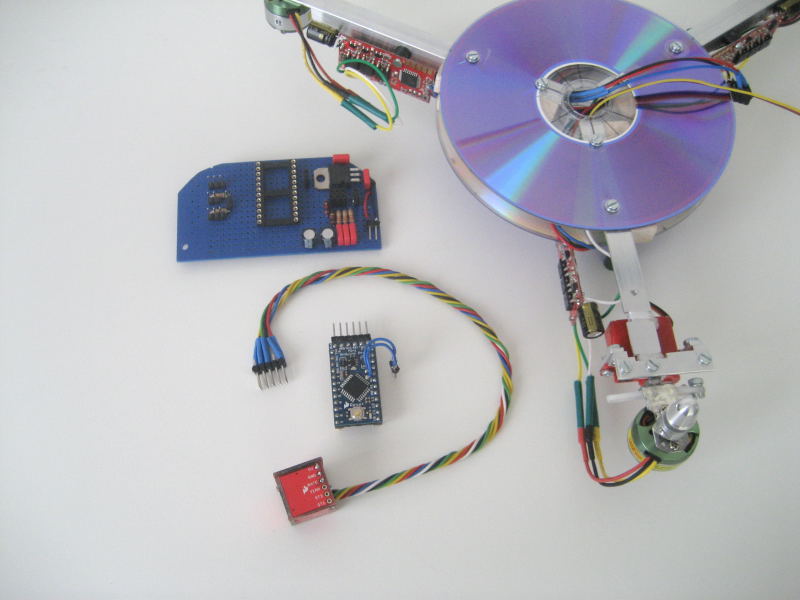
Het begon voor mij met het bestellen van de microcontroller. De besturing van de tricopter. Hier draait de software die de commando’s van een afstandbesturing ontvangt en daarmee de motoren van de propellers aanstuurt. Om het ding horizontaal te houden, zitten er een aantal sensoren in die de stand van de tricopter meten. De microcontroller corrigeert daarmee de stand van de tricopter in de lucht.

Na twee weken ontving ik de microcontroller en de sensoren uit Amerika. Erg kleine printjes. Maar ik kon aan de gang. Met behulp van software op de PC kan ik programma’s voor de microcontroller maken en erin wegsschrijven. Zo kon ik na enkele dagen al de sensoren inlezen. De sensoren (3 hoekversnellingsopnemers en 2 lineaire versnellingopnemers – voor degene die hier niets van snappen: sorry, ook ik heb mijn “vakjargon” ![]() ) heb ik tot een compacte sensorpack gelijmd, geheel volgens de aanwijzigen van de ontwerper.
) heb ik tot een compacte sensorpack gelijmd, geheel volgens de aanwijzigen van de ontwerper.

Het eerste programma kon deze sensoren uitlezen en de versnelling- en hoekwaardes via de PC op het scherm afdrukken.
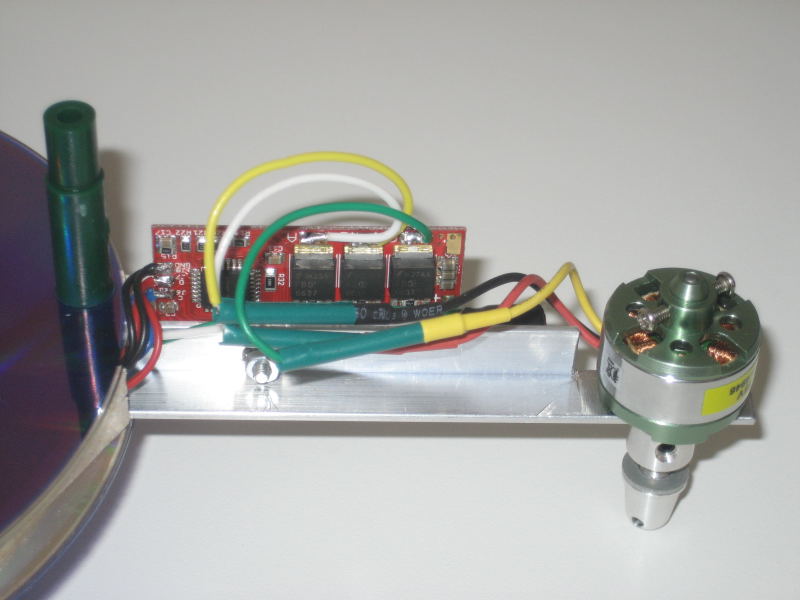
Daarna heb ik de motoren en propellers besteld. De motoren zijn geen gewone motoren, maar lichtgewicht, high-power brushless 3-fase motoren. Bovendien zijn het outriggers, dat betekent dat een deel van de buitenkant van de motor ook draait. Het feit dat het 3-fase motoren zijn, betekent bovendien dat je ze niet zomaar op een spanning kunt aansluiten. Ze hebben een speciale aansturing nodig, een brushless controller (Bl-ctrl). Deze heb ik ook besteld en vorige week binnengekregen.


De Bl-ctrl controllers worden op de microcontroller aangesloten via een i2c bus. Dit is een 2-draads systeem, waarmee de microcontroller een snelheid aan de bl-ctrl controller doorgeeft. De controller stuurt vervolgens de motor en propeller aan. Een digitale snelheidsregelaar dus, waarmee de software in de microcontroller de snelheid van de propeller kan bepalen.
Om te achterhalen hoe het snelheidscommando en de daadwerkelijk stuwkracht zich verhouden heb ik een testopstellinkje gemaakt. Een motor/propeller combinatie, een keukenweegschaal en de microcontroller en bl-ctrl controller. Verder nog een multimeter en een thermometer om de temperatuur van de bl-ctrl controller te meten.

De onderstaande tabel en grafiek laat het snelheidscommando (tussen 0 en 255), de gemeten stuwkracht, en de opgenomen stroom en temperatuur van de bl-ctrl controller zien. De bl-ctrl controller wordt namelijk best warm, eigenlijk ook niet raar want alle 2.7 A die de voeding kon leveren ging er doorheen… Dit maximum is bij snelheidscommando 160 bereikt, en qua software zouden we nog 95 meer kunnen geven.
| Snelheid commando | Stroom [mA] | Stuwkracht [g] | Temperatuur [C] |
|---|---|---|---|
| 0 | 0 | 0 | 29.7 |
| 20 | 180 | 16 | 40.4 |
| 40 | 330 | 29.5 | 46.6 |
| 60 | 520 | 44.5 | 50.1 |
| 80 | 730 | 59.5 | 53.3 |
| 100 | 1000 | 75 | 56.8 |
| 120 | 1390 | 93.5 | 62.2 |
| 140 | 2040 | 120.5 | 70.5 |
| 160 | 2710 | 140 | ? |
(Roxxy 2216/25 outrigger motor en GWS 5x3x3 propeller)
Volgens opgave van de ontwerper zou bij 80 gram stuwkracht (en 3 motoren) het ding van de grond moeten komen. Dat moet dus wel gaan lukken.
De volgende stap is het kopen van een afstandbesturing met geschikte ontvanger. Wat betreft de ontvanger, het moet er een zijn waar alle servo kanalen in één signaal zitten. Dit signaal wordt aangesloten op de microcontroller die vervolgens in software de afzonderlijke kanalen uitleest. Deze kanalen zijn dan bijvoorbeeld bedoeld als het snelheidscommando voor de motoren.
Wat betreft zender/ontvanger kan ik dan ook weer kiezen voor het oude vertrouwde 35/40 MHz systeem of het nieuwe 2.4GHz systeem. Ik neig naar het laatste (geen geneuzel met kristallen en ook geen gevaar dat ik onbedoeld iemands modelvliegtuig laat neerstorten), het is enkel de vraag met hoeveel kanalen ik de zender zal kopen. Aan alles hangt een prijs en zo ook hier….
Lorem ipsum dolor sit amet, consectetuer adipiscing elit, sed diam nonummy nibh euismod tincidunt ut laoreet dolore magna aliquam erat volutpat. Ut wisi enim ad minim veniam, quis nostrud exerci tation ullamcorper suscipit lobortis nisl ut aliquip ex ea commodo consequat. Duis autem vel eum iriure dolor in hendrerit in vulputate velit esse molestie consequat, vel illum dolore eu feugiat nulla facilisis at vero eros et accumsan et iusto odio dignissim qui blandit praesent luptatum zzril delenit augue duis dolore te feugait nulla facilisi.